mgMake
work by Matt Gordon
fabrication
code
sound
publications
portfolio
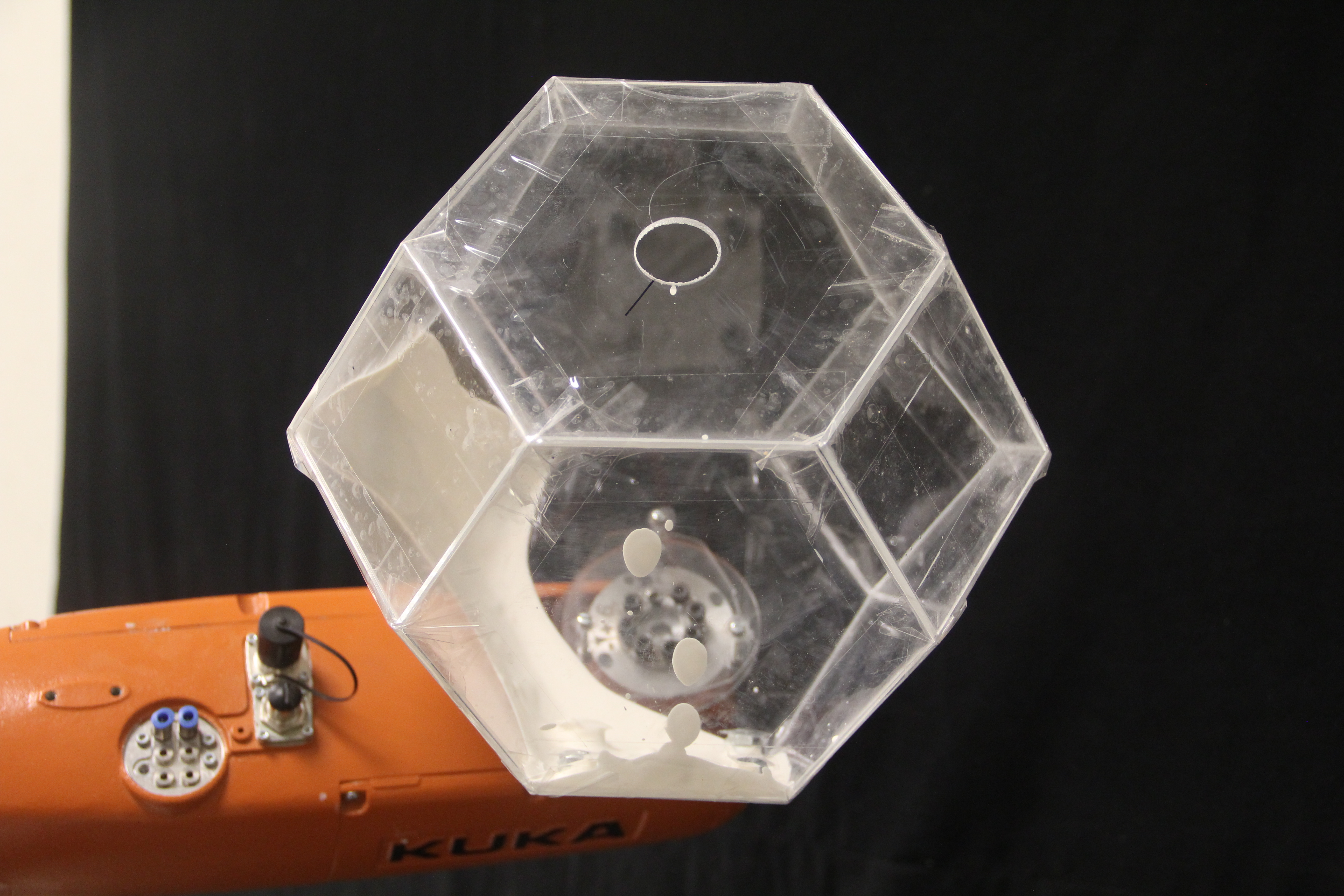
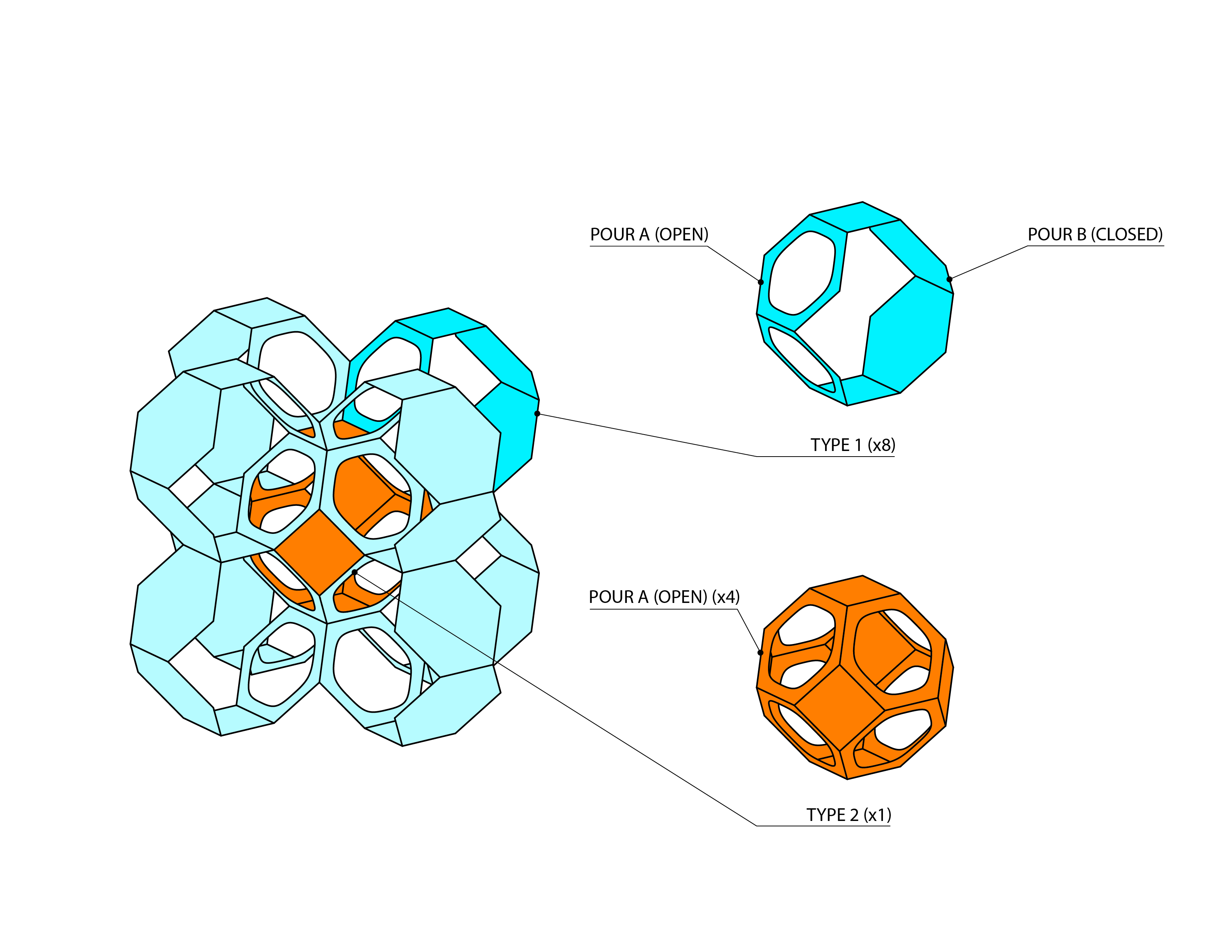
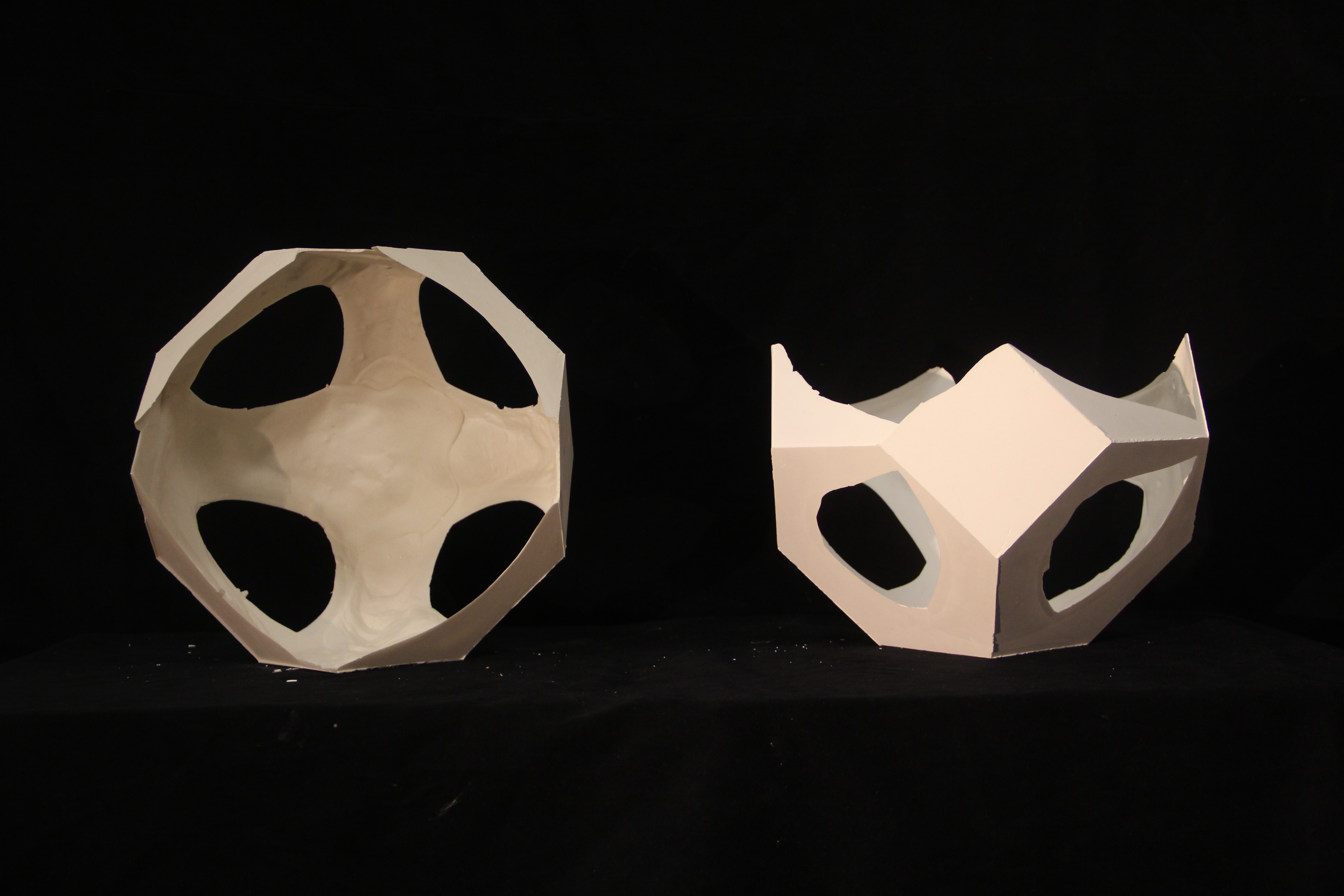
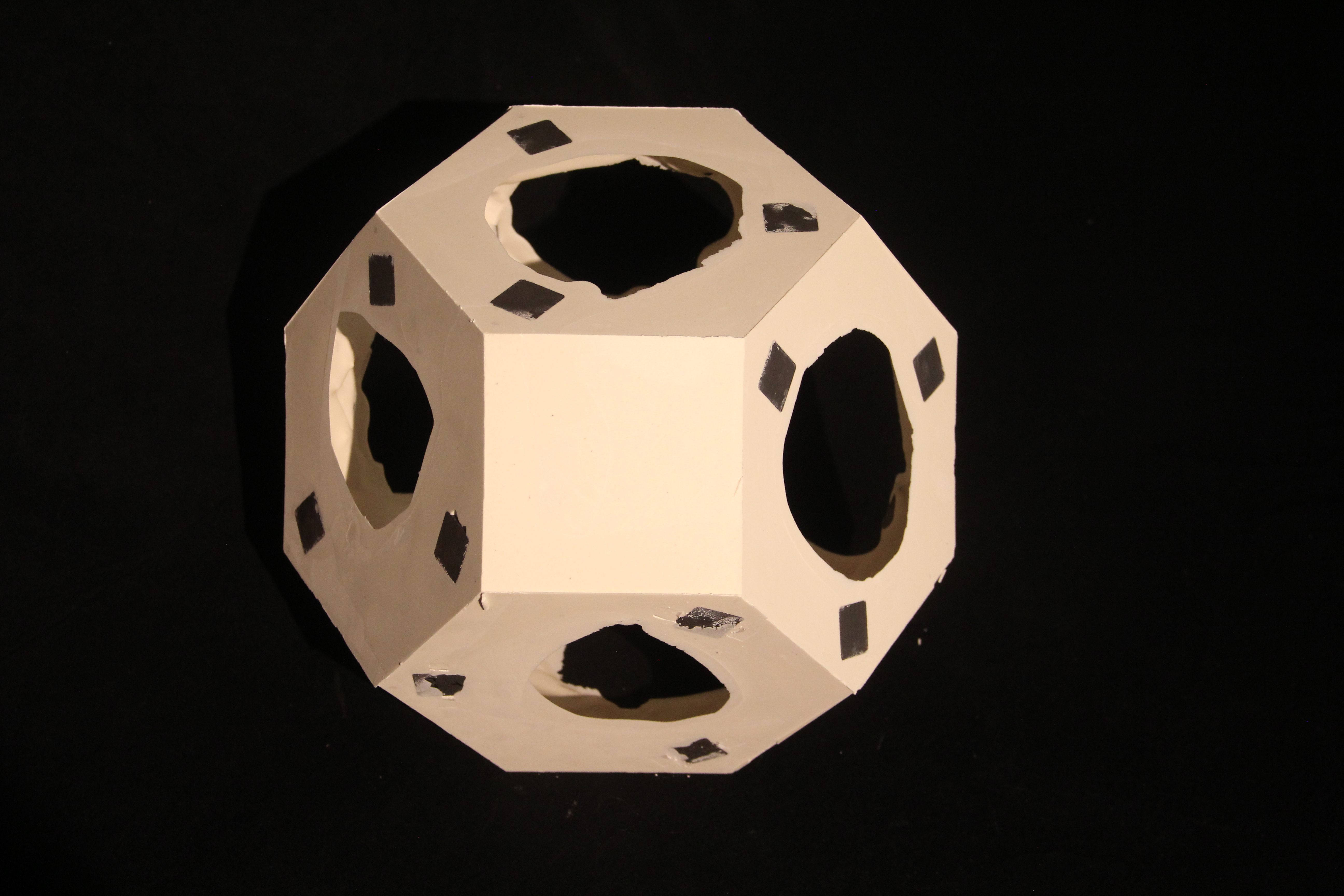
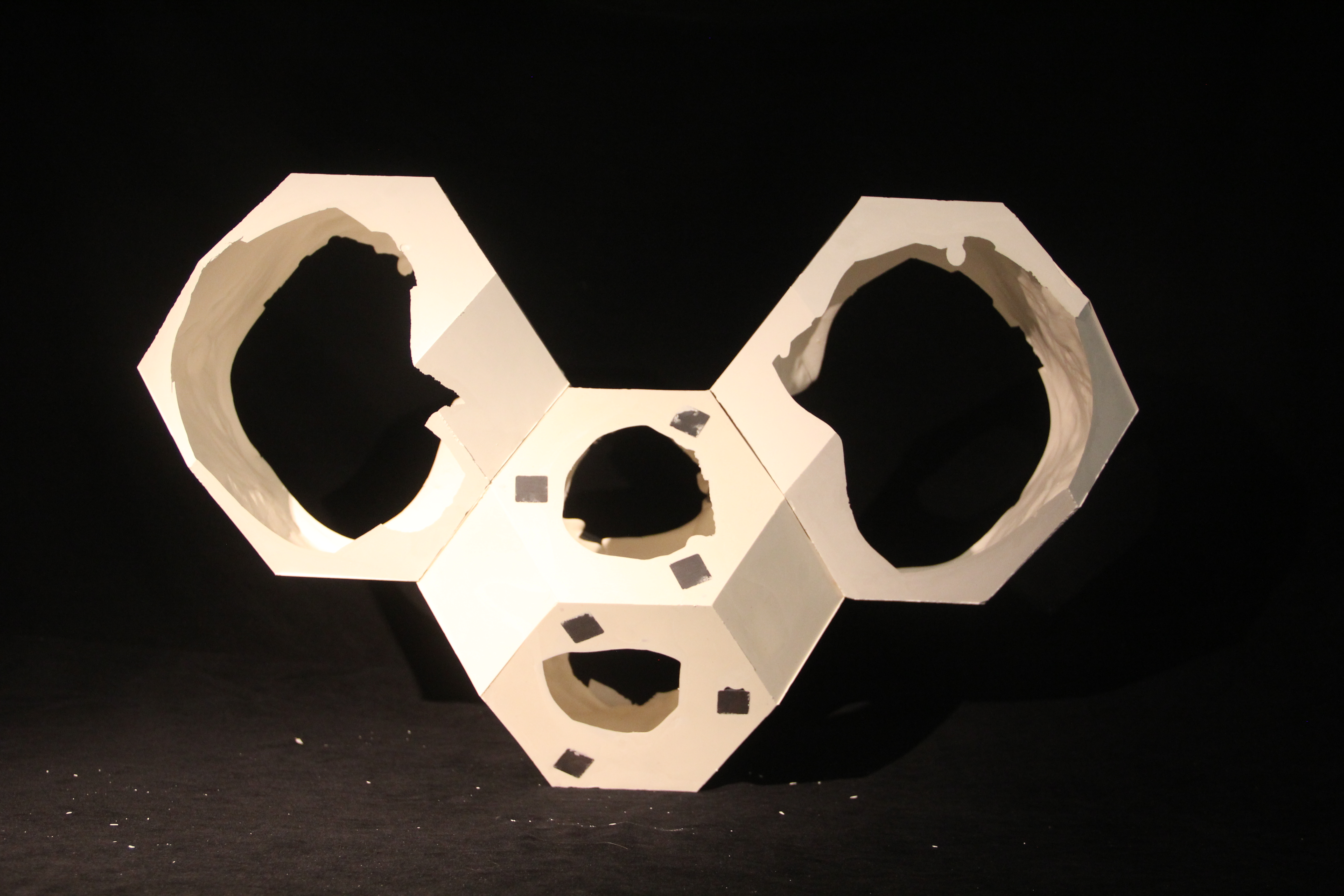
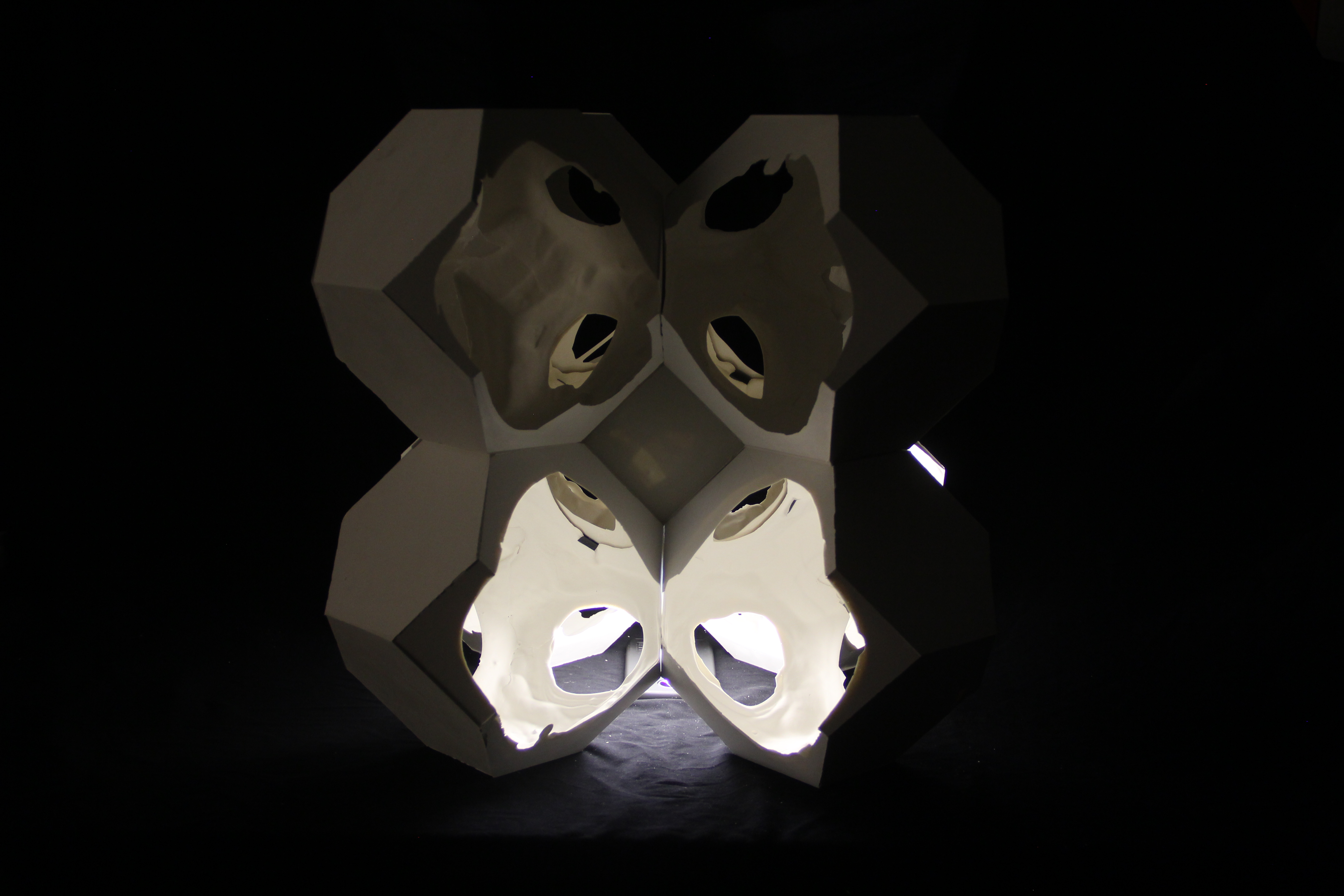
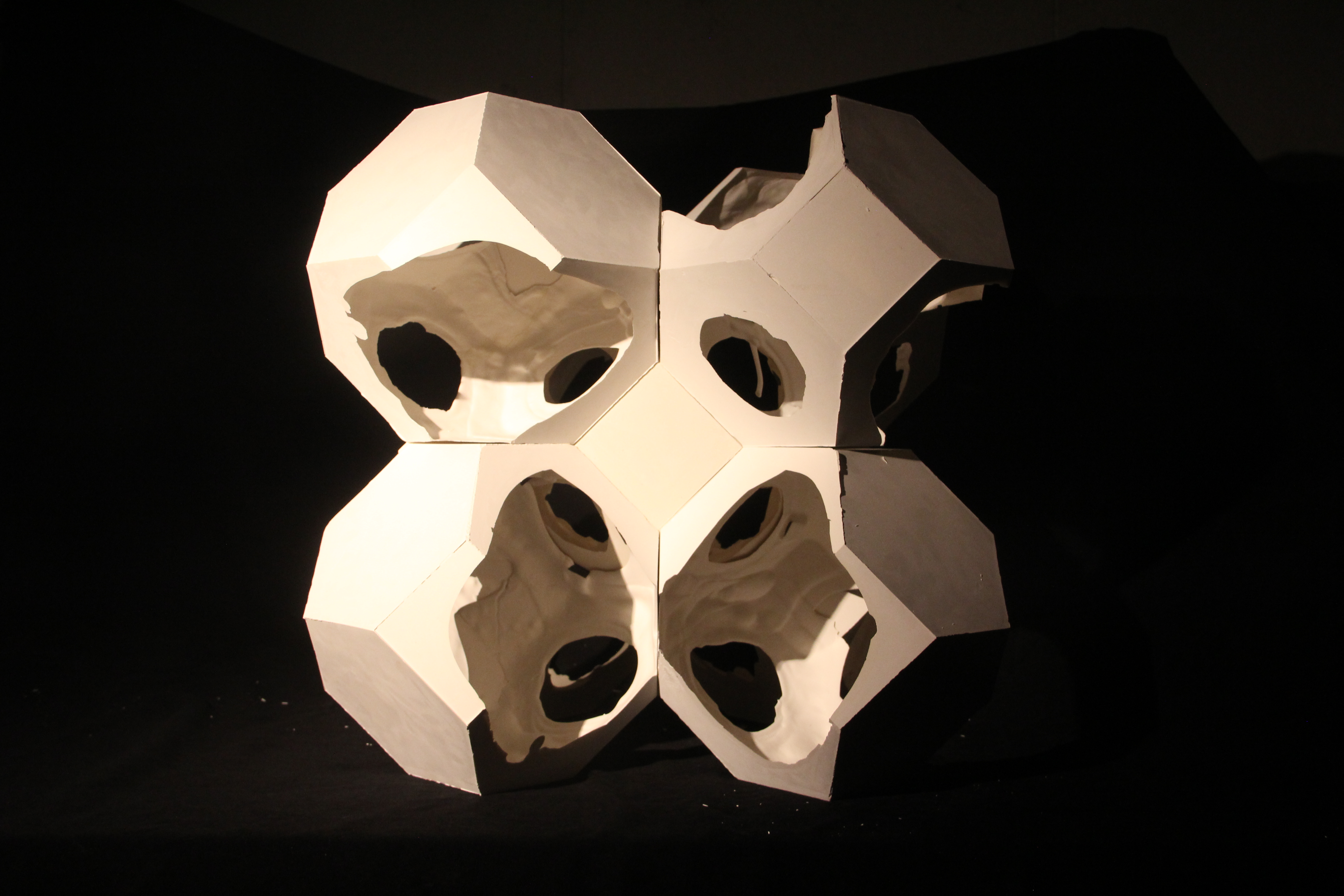
'Shell Polyhedra' explores adding additional structure and form to thin shell casts via controlled motion during the curing process. The formwork is held by a six-axis robot and oriented along designed paths to fill edges and faces of tessellating polyhedra. The resulting objects combine the precision of the geometry and motion with the stochastic forms of flowing liquids.
The pieces are attached using magnets or other hardware embedded in their surfaces during casting. The layout of the magnets and symmetry of the polyhedra allows for multiple configurations and assemblies from a single set of pieces.
Authors:
M. Gordon - UVa SARC ARRG
M. Johnson - UVa SARC ARRG
University:
University of Virginia, School of Architecture, Architectural Robotics Research Group
"Shell Polyhedra" was accepted to be presented at Rob|Arch 2018 (robarch2018.org) through the Rob|Arch 2018 Call for Videos.